skid steer robot kinematic model In this paper, we develop an analysis and experimental kinematic scheme for a . We normally go with one chain through the tie down hook on the frame and another over the blade. Then we strap the bucket. On the mini mini we just use a strap or chain across the floor.
0 · skid steer with side door
1 · modeling a 4 wheel robot
2 · jcb skid steer specs
3 · jcb mini skid steer
4 · bobcat jcb
5 · 4 wheeler robot
6 · 4 wheel skid steering robot problems
7 · 4 wheel skid steering robot
Learn about the easy-to-use controls on your mini excavator before starting your next outdoor project.
It was shown that the proposed kinematics model estimated for a skid-steering .Skid-steering mobile robots are widely used because of their simple mechanism and robustn.An algorithm based on kinematic oscillator which is used to control four wheel skid-steering . In this paper, we develop an analysis and experimental kinematic scheme for a .
In this section kinematic and dynamic model of four-wheel skid-steering mobile robot is .A mathematical model of a 4-wheel skid-steering mobile robot is presented in a systematic .A survey and comparison of previous work on kinematic models for skid-steer mobile robots. . Based on the analysis of the kinematics of the skid-steered mobile robot, we .
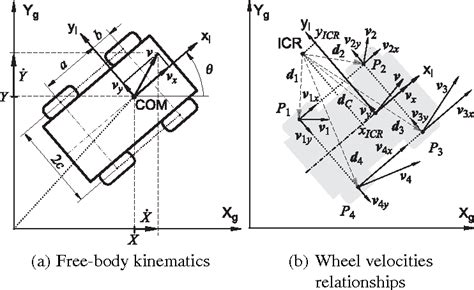
It was shown that the proposed kinematics model estimated for a skid-steering mobile robot improves the system performance in terms of reduced dead-reckoning errors, with a smaller position error within 0.03 m, and a smaller angle error within 0.1 rad with respect to the default P3-AT model.An algorithm based on kinematic oscillator which is used to control four wheel skid-steering mobile robot (4WD SSMR) is presented, and a dynamical model of SSMR is included by using backstepping technique and Lyapunov analysis. In this paper, we develop an analysis and experimental kinematic scheme for a skid-steering wheeled vehicle based-on a laser scanner sensor. The kinematics model is established based on the boundedness of the instantaneous centers of rotation (ICR) of treads on the 2D motion plane.
In this section kinematic and dynamic model of four-wheel skid-steering mobile robot is presented. We refer to the real experimental construction consists of two-wheel differentially driven mobile robots namely MiniTracker 3 (see Fig.1) [9]. In order to simplify the mathematical model of SSMR we assume that [2] • plane motion is considered .A mathematical model of a 4-wheel skid-steering mobile robot is presented in a systematic way. The robot is considered as a subsystem consisting of kinematic, dynamic and drive levels.A survey and comparison of previous work on kinematic models for skid-steer mobile robots. Our results show that the friction-based kinematic model can successfully capture the dynamics of the robot to predict slippage, and hence provides more accurate pre-dictions of the robot’s motion when compared to the state-of-the-art on a real-world .
Based on the analysis of the kinematics of the skid-steered mobile robot, we reveal the underlying geometric and kinematic relationships between the wheel slips and locations of the instantaneous rotation centers.This paper presents a kinematic extended Kalman filter (EKF) designed to estimate the location of track instantaneous centers of rotation (ICRs) and aid in model-based motion prediction of skid-steer robots. This article describes an improved kinematic model that takes these factors into account and verifies the model in a variety of working conditions, including different terrains and asymmetric loads, for two different wheeled skid-steered platforms.This article describes an improved kinematic model that takes these factors into account and verifies the model in a variety of working conditions, including different terrains and asymmetric loads, for two different wheeled skid-steered platforms.

skid steer with side door
It was shown that the proposed kinematics model estimated for a skid-steering mobile robot improves the system performance in terms of reduced dead-reckoning errors, with a smaller position error within 0.03 m, and a smaller angle error within 0.1 rad with respect to the default P3-AT model.An algorithm based on kinematic oscillator which is used to control four wheel skid-steering mobile robot (4WD SSMR) is presented, and a dynamical model of SSMR is included by using backstepping technique and Lyapunov analysis. In this paper, we develop an analysis and experimental kinematic scheme for a skid-steering wheeled vehicle based-on a laser scanner sensor. The kinematics model is established based on the boundedness of the instantaneous centers of rotation (ICR) of treads on the 2D motion plane.In this section kinematic and dynamic model of four-wheel skid-steering mobile robot is presented. We refer to the real experimental construction consists of two-wheel differentially driven mobile robots namely MiniTracker 3 (see Fig.1) [9]. In order to simplify the mathematical model of SSMR we assume that [2] • plane motion is considered .
A mathematical model of a 4-wheel skid-steering mobile robot is presented in a systematic way. The robot is considered as a subsystem consisting of kinematic, dynamic and drive levels.
A survey and comparison of previous work on kinematic models for skid-steer mobile robots. Our results show that the friction-based kinematic model can successfully capture the dynamics of the robot to predict slippage, and hence provides more accurate pre-dictions of the robot’s motion when compared to the state-of-the-art on a real-world .
Based on the analysis of the kinematics of the skid-steered mobile robot, we reveal the underlying geometric and kinematic relationships between the wheel slips and locations of the instantaneous rotation centers.This paper presents a kinematic extended Kalman filter (EKF) designed to estimate the location of track instantaneous centers of rotation (ICRs) and aid in model-based motion prediction of skid-steer robots.
This article describes an improved kinematic model that takes these factors into account and verifies the model in a variety of working conditions, including different terrains and asymmetric loads, for two different wheeled skid-steered platforms.

electrical board for new holland lx865 skid steer

modeling a 4 wheel robot
Descriptions: Designed for small and medium-sized projects: With a compact .
skid steer robot kinematic model|4 wheel skid steering robot